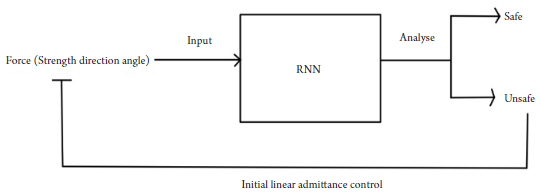
手术机器人的稳定系统,可以降低眼科医生手术时的生理性震颤,稳定手术仪器,从而大大提升手术的安全系数和成功率。我国研究团队[11]开发的“稳定手”眼机器人(“steady hand” eye robot,SHER)融合了主动介入机器人系统(active interventional robot system,AIRS),其核心为具有长短期记忆(long and short term memory,LSTM)单元的递归神经网络(recurrent neural network,RNN)。RNN可以对眼科医生即将为眼球施加的手术应力进行预测和分类:首先以预测的手术应力为输入值(包括大小、方向、角度等),其次对输入值进行预测分析,然后将手术应力分为“安全”和“不安全”两类,最后,如果预测结果为“不安全”时,SHER便可以通过初始线性导纳控制来驱动机械手以减小手术应力(图1)。据评估,徒手操作的不安全作用力比例高达26%,而AIRS可以将视网膜手术中不安全的作用力比例控制在3%以下[11]。
图1 RNN递归神经网络在手术应力预测分析中的应用原理 Figure 1 Application principle of RNN recurrent neural network in the prediction and analysis of surgical stress
1. 本科教学质量工程项目[教务(2021)93号]。This work was supported by the Undergraduate Teaching Quality Engineering Project, China [(2021) No. 93].
2. 本科教学质量工程项目 [ 教务 (2021)93 号 ]。This work was supported by the Undergraduate Teaching Quality Engineering Project, China [(2021) No. 93].
参考文献
1. Jagtap AS, Riviere CN. Applied force during vitreoretinal microsurgery with handheld instruments[J]. Conf Proc IEEE Eng Med Biol Soc, 2004, 2004: 2771-2773.
2. Urias MG, Patel N, He C, et al. Artificial intelligence, robotics and eye surgery: are we overfitted?[J]. Int J Retina Vitreous, 2019, 5: 52.
4. Sunshine S, Balicki M, He X, et al. A force-sensing microsurgical instrument that detects forces below human tactile sensation[J]. Retina, 2013, 33(1): 200-206.
5. Fang L, Cunefare D, Wang C, et al. Automatic segmentation of nine retinal layer boundaries in OCT images of non-exudative AMD patients using deep learning and graph search[J]. Biomed Opt Express, 2017, 8(5): 2732-2744.
6. Carrasco-Zevallos OM, Keller B, Viehland C, et al. Optical coherence tomography for retinal surgery: perioperative analysis to real-time four-dimensional image-guided surgery[J]. Invest Ophthalmol Vis Sci, 2016, 57(9): OCT37-OCT50.
8. Fundus surgery in our city has entered a new era: live fundus surgery with Zeiss OCT navigation was unveiled in Shanghai[EB/OL]. [2021-09-10]. http://www.zmdtvw.cn/showinfo-429-243491-0.html.
9. Shah P, Mishra DK, Shanmugam MP, et al. Validation of deep convolutional neural network-based algorithm for detection of diabetic retinopathy - artificial intelligence versus clinician for screening[J]. Indian J Ophthalmol, 2020, 68(2): 398-405.
10. Eckardt C, Paulo EB. Heads-up surgery for vitreoretinal procedures: an experimental and clinical study[J]. Retina, 2016, 36(1): 137-147.
11. Palácios RM, de Carvalho ACM, Maia M, et al. An experimental and clinical study on the initial experiences of Brazilian vitreoretinal surgeons with heads-up surgery[J]. Graefes Arch Clin Exp Ophthalmol, 2019, 257(3): 473-483.
12. He C, Patel N, Ebrahimi A, et al. Preliminary study of an RNN-based active interventional robotic system (AIRS) in retinal microsurgery[J]. Int J Comput Assist Radiol Surg, 2019, 14(6): 945-954.
13. Jensen PS, Grace KW, Attariwala R, et al. Toward robot-assisted vascular microsurgery in the retina[J]. Graefes Arch Clin Exp Ophthalmol, 1997, 235(11): 696-701.
14. Gijbels A, Smits J, Schoevaerdts L, et al. In-human robot-assisted retinal vein cannulation, a world first[J]. Ann Biomed Eng, 2018, 46(10): 1676-1685.
15. de Smet MD, Meenink TC, Janssens T, et al. Robotic assisted cannulation of occluded retinal veins[J]. PLoS One, 2016, 11(9): e0162037.
16. de Smet MD, Naus GJL, Faridpooya K, et al. Robotic-assisted surgery in ophthalmology[J]. Curr Opin Ophthalmol, 2018, 29(3): 248-253.
17. Edwards TL, Xue K, Meenink HCM, et al. First-in-human study of the safety and viability of intraocular robotic surgery[J]. Nat Biomed Eng, 2018, 2: 649-656.
18. Kuchenbecker KJ, Gewirtz J, McMahan W, et al. VerroTouch: high-frequency acceleration feedback for telerobotic surgery[M]//Kappers AML, van Erp JBF, Bergmann Tiest WM, et al. Haptics: generating and perceiving tangible sensations. EuroHaptics 2010. Lecture Notes in Computer Science. Berlin, Heidelberg: Spring, 2010: 189-196.
19. Wedmid A, Llukani E, Lee DI. Future perspectives in robotic surgery[J]. BJU Int, 2011, 108(6 Pt 2): 1028-1036.
'%20fill='white'%20fill-opacity='0.01'/%3e%3cmask%20id='mask0_3477_29692'%20style='mask-type:luminance'%20maskUnits='userSpaceOnUse'%20x='0'%20y='0'%20width='16'%20height='16'%3e%3crect%20id='&%23232;&%23146;&%23153;&%23231;&%23137;&%23136;_2'%20x='16'%20width='16'%20height='16'%20transform='rotate(90%2016%200)'%20fill='white'/%3e%3c/mask%3e%3cg%20mask='url(%23mask0_3477_29692)'%3e%3cpath%20id='&%23232;&%23183;&%23175;&%23229;&%23190;&%23132;'%20d='M14%205L8%2011L2%205'%20stroke='%23333333'%20stroke-width='1.5'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)